



How to Using Arduino Designing a Complete Obstacle-Avoiding Robot?
January 03 2025 
Inquiry
Global electronic component supplier AMPHEO PTY LTD: Rich inventory for one-stop shopping. Inquire easily, and receive fast, customized solutions and quotes.
QUICK RFQ
ADD TO RFQ LIST
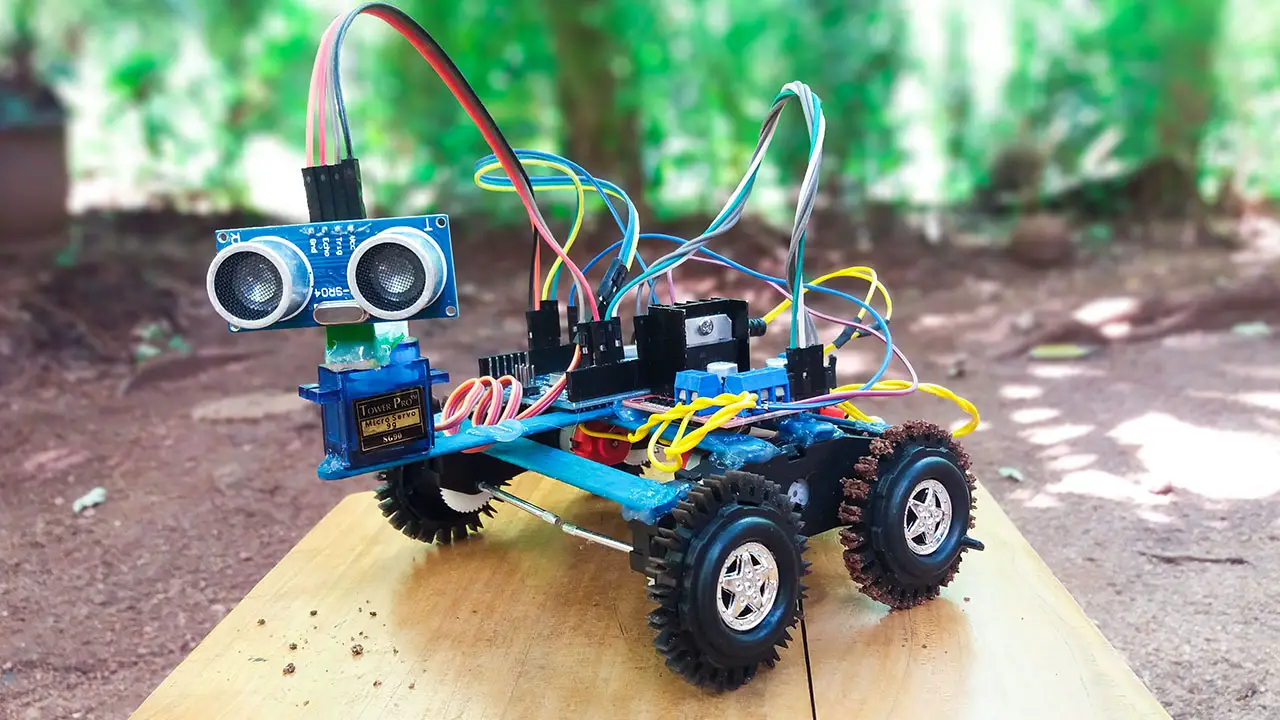
We’ll build an ultrasonic sensor-based obstacle-avoiding robot using Arduino. It’s a common, beginner-friendly approach with a balance of simplicity and effectiveness.
We’ll build an ultrasonic sensor-based obstacle-avoiding robot using Arduino. It’s a common, beginner-friendly approach with a balance of simplicity and effectiveness.
📋 1. Components Required:
Electronics:
- 🧠 Arduino Uno (or compatible microcontroller)
- 📡 Ultrasonic Sensor (e.g., HC-SR04)
- 🔌 Motor Driver Module (L298N)
- 🚗 2 DC Motors with Wheels
- 🔄 Caster Wheel (for balance)
- 🔋 Battery Pack (9V or 12V)
- 📦 Chassis/Body Kit
- 🪛 Breadboard and Jumper Wires
Optional:
- ⚡ On/Off Switch
- 🔊 Buzzer (for sound feedback)
- 💡 LEDs (for status indication)
🛠️ 2. Circuit Diagram and Connections:
Ultrasonic Sensor (HC-SR04):
- VCC: 5V on Arduino
- GND: GND on Arduino
- Trigger Pin: Digital Pin 9
- Echo Pin: Digital Pin 10
Motor Driver (L298N):
- IN1 & IN2 (Motor 1): Digital Pin 4, 5
- IN3 & IN4 (Motor 2): Digital Pin 6, 7
- ENA & ENB: Connect to PWM pins (e.g., 3, 11)
- VCC: Battery Positive
- GND: Battery Ground & Arduino GND
DC Motors:
- Motor 1: Left Wheel
- Motor 2: Right Wheel
💻 3. Arduino Code:
Below is a basic example of an obstacle-avoiding robot code:
🔄 4. Working Principle:
- The ultrasonic sensor emits sound waves to detect obstacles.
- If an obstacle is detected within 20 cm, the robot:
- Stops
- Moves backward
- Turns (e.g., right)
- If no obstacle is detected, the robot continues moving forward.
📊 5. Calibration and Testing:
- Upload the code to Arduino.
- Power the robot using the battery pack.
- Place obstacles in front and observe how it reacts.
- Adjust motor speed and distance threshold if needed.
🧠 6. Improvements (Optional):
- Add multiple ultrasonic sensors (front, left, and right) for better coverage.
- Integrate an IR sensor for closer range detection.
- Add a buzzer or LED for alerts.
- Use AI or camera-based vision systems for smarter navigation.
Isn't it easy? Have you learned it?
Related Articles
- ·What are some common Arduino projects for beginners?
- ·Why can STM32 stand out from many 32-bit microcontrollers?
- ·How to connect Arduino to ESP8266 for networking function?
- ·What are the differences between various Arduino boards?
- ·DS18B20 Temperature Sensor Detailed Explanation and Use Cases
- ·ESP32 vs Arduino, Compare their differences and use cases
- ·How to build a Raspberry Pi robot?
- ·Which is better for beginners: ESP32 or STM32? A robot example
- ·Which Arduino Board is Best for Beginners?
- ·The Complete Guide to Component Selection for Electronic Design
Populer Posts
R5F5651EDGLK#20
Renesas Electronics America Inc
PIC16LC72-04/SP
Microchip Technology
MC9S08QE4CWJ
NXP Semiconductors
R5F52317AGND#20
Renesas Electronics America Inc
PIC32MK1024GPD064-I/PT
Microchip Technology
EFM32ZG222F4-B-QFP48R
Silicon Labs
ATSAM3SD8CA-AU
Microchip Technology
AT32UC3B1128-Z1UT
Microchip Technology
Z8F041ASB020EG
Zilog
R5F56604CGFM#30
Renesas Electronics America Inc
R5F566TABDFL#30
Renesas Electronics America Inc
DSPIC33CK256MP306T-I/PT
Microchip Technology